


Links
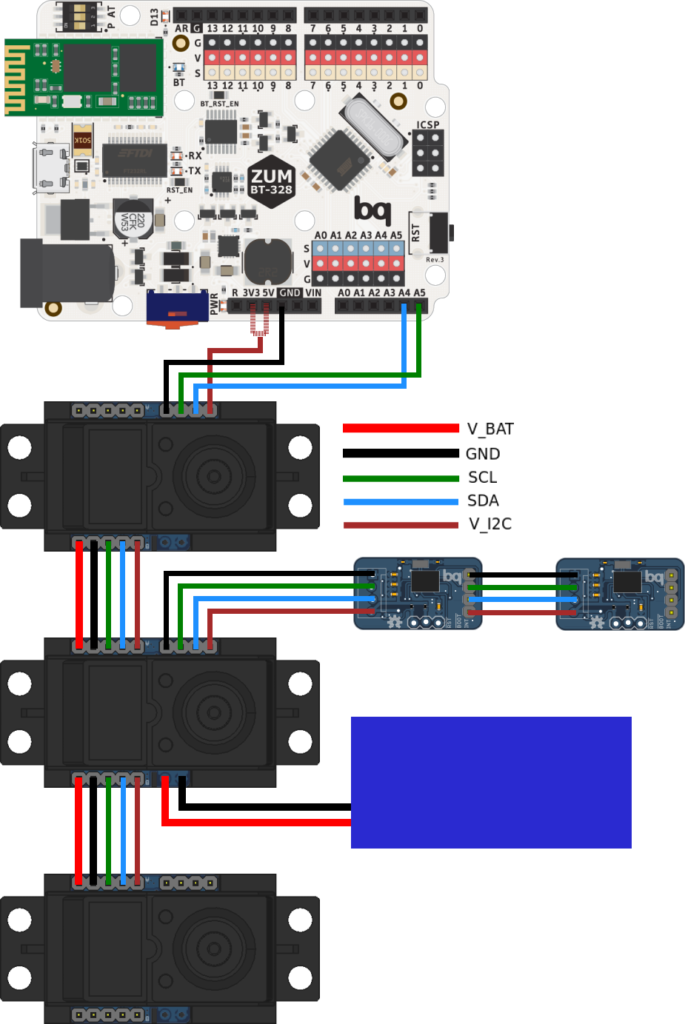
Connections
V_BAT: Main power line, energizes the motor and all the servo's ICs. Works between 5 and 12 volts. V_I2C: Voltage reference for the I2C bus and powers components on the auxiliary bus. Must be 3.3V or 5V.
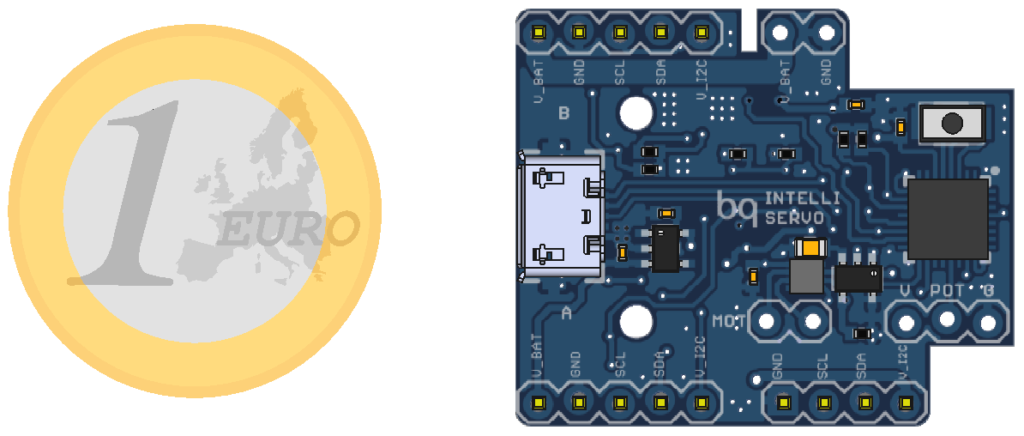
The servo has different connector groups:
- Main bus (5 lines): It is used to power and control the servos in daisy-chain configuration, attaching each one's A side to the previous' B side.
- Auxiliary bus (4 lines): Its function is to provide an extra link to the I2C bus, to allow other devices to be used at the same time.
- Power bus (2 lines): The main bus can be powered from the power bus on any servo, or from the last servo's main bus V_BAT and GND.
- Micro USB: Used both to upload the firmware to the board as to use it to control the servo directly from the PC, without involving other microcontrollers.
Installing the firmware
The board runs the firmware included in the Software/Firmware section. It is written in C++ and uses Mbed, to upload it connect the board over USB and then power it using the V_BAT and GND lines while pressing the button.
To compile it use the "mBuino" Mbed platform, which uses the smaller LPC11U24FHI33/301 model instead of the larger LPC11U24FBD64/401 model normally used in other boards. This is important because the EEPROM memory maps are different between both and the board won't be able to access the EEPROM if the wrong platform is chosen.
License
This project is licensed under Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)

Hi,
I’m a french studient at ENSAM and i work on a robotic project for three years (a modular robot like Dtto as “https://hackaday.io/project/9976”)
After a time of mechanical problems (resolved from some), i now face to many electronic problems. One of them is the reading of a servo (angle and consumption) : when i saw your concept, i thought I NEED THIS !!! I really need this. So i’m wondering if you sell it ? and how much does it cost ?
thank you for your attention
Nathan SCHAAL
Hi, thanks a lot!
I appreciate your enthusiasm but I’m sorry to say that I don’t sell them, however everything’s uploaded to github if you want to give it a try 🙂
Best of luck!
Love this idea! What is the purpose of the ” i2c repeater” ic? I too am using i2c in my actuators but haven’t came across any reason to use such a thing.
Thanks! The problem with I2C is that the length (capacitance) of the bus greatly affects its performance. Adding a repeater effectively extends the maximum bus length, so the servos can be more spaced out.